ROS와 ESP32 tcp 통신을 진행해 보았다.
우선 ESP32 또는 ESP8266 보드를 아두이노 IDE 환경에서 개발하고, 업로드 하기위해
환경설정 - 추가적인보드 매니저 URLs 에 다음과 같이 두개의 URL을 추가한다.
http://arduino.esp8266.com/stable/package_esp8266com_index.json
https://dl.espressif.com/dl/package_esp32_index.json

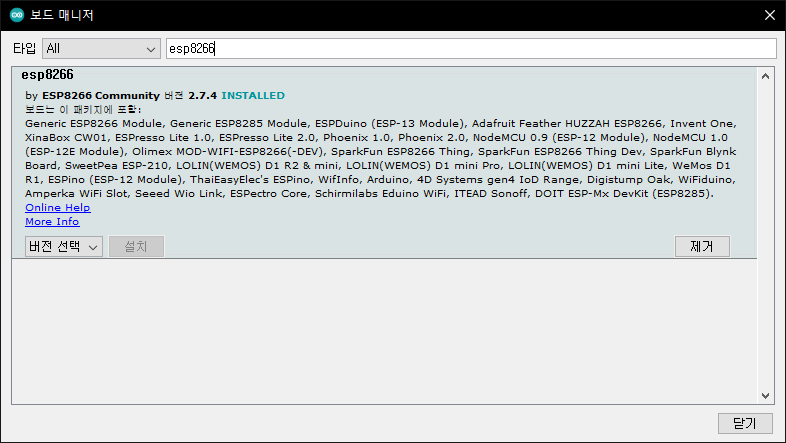
보드를 추가하기 위해 툴 -> 보드 -> 보드매니저 로 들어가서 esp32와 esp8266 보드를 설치해준다.


소스코드
/// ROS-Esp WiFi(tcp)
/// doljokilab.tistory.com
/// dol42@kakao.com
/// made by. dol
#include <WiFi.h> // if use esp32
//#include <ESP8266WiFi.h> // if use esp8266
#include <ros.h>
#include <std_msgs/String.h>
const char* ssid = "your_wifi_name"; //wifi name ex) iptime
const char* password = "your_ssid_pw"; //ssid passwd ex) 12345678!
IPAddress server(000, 000, 000, 000); //target ip address(roscore) ex) 192.111.111.111 -> 192,111,111,111
const uint16_t serverPort = 11411; //target port(roscore)
ros::NodeHandle nh;
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg);
char hello[13] = "doljokilab";
void setup() {
Serial.begin(115200);
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
Serial.println("connection Start");
nh.getHardware()->setConnection(server, serverPort);
Serial.println(nh.getHardware()->getLocalIP());
nh.initNode();
nh.advertise(chatter);
str_msg.data = hello;
}
void loop() {
if (!nh.connected()) {
Serial.println("connection failed");
}
else {
Serial.println("Connected");
chatter.publish( &str_msg );
}
nh.spinOnce();
delay(5000);
}실행화면
ESP-32(LOLIN D32)에서 실행한 시리얼모니터 화면은 다음과 같다.

ROS
사전에 rosserial이 설치 되어있어야 한다.
업로드 후 roscore 실행 후 다음과 같이 실행
rosrun rosserial_python serial_node.py tcp
실행결과

확인을 위해 다음을 입력하여 /chatter 토픽을 확인해본다.
rostopic echo /chatter실행결과

/chatter 토픽 data가 제대로 받아지는 것을 확인 가능하다.
반응형
'개발관련 > ROS' 카테고리의 다른 글
| [ROS] 간단한 Publisher과 Subscriber 예제(python) (11) | 2021.01.22 |
|---|---|
| [ROS] talker.py(Publisher) 코드 분석하기 (0) | 2021.01.22 |
| WSL2 에서 Publickey error 발생시 (0) | 2021.01.02 |
| WSL2로 윈도우10에서 ROS 설치하기 (2) | 2021.01.01 |
| [ROS] ubuntu 18.04에 ROS Melodic 설치하기(PC) (1) | 2020.05.25 |